


Section: New Results
Modelling and Identification
Subject-specific Center of Mass estimation in human subjects
Participants : Alejandro González, Mitsuhiro Hayashibe, Philippe Fraisse.
Center of mass position (CoM) in humanoid robots can be used to generate a joint trajectory suitable for walking and standing. Oscillations of the CoM while maintaining a standing posture have been observed in older patients. These oscillations are thought to occur due a change in the subject's balancing strategy. This is why the motion of the CoM in generally considered as good metric to be used while diagnosing pathologies which affect gait. With this in mind we propose the use of the statically equivalent serial chain (SESC) to provide a subject specific estimate of CoM position. The state of the art techniques for CoM estimation in humans involve the use of expensive equipment in a laboratory setting, making it difficult to use as a clinical tool or inside the home environment. Current work for diagnosing a subject's balance moves away from this, focusing on wearable and minimally invasive sensors that obtain information during the subject's daily activities. We propose the use of widely available sensors like the Kinect camera, for tracking the subject's movements, and the Wii balance board during the calibration of the SESC.
|
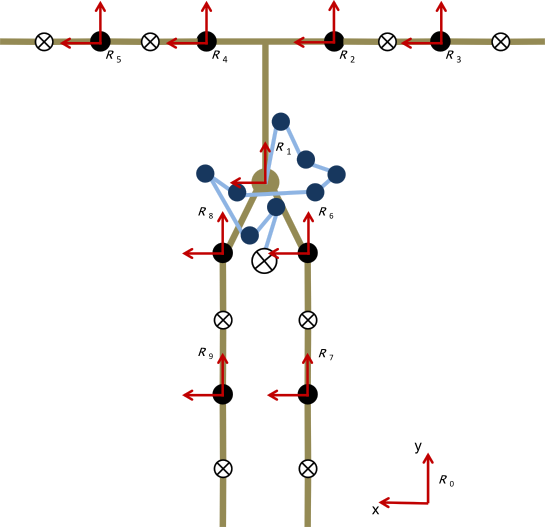

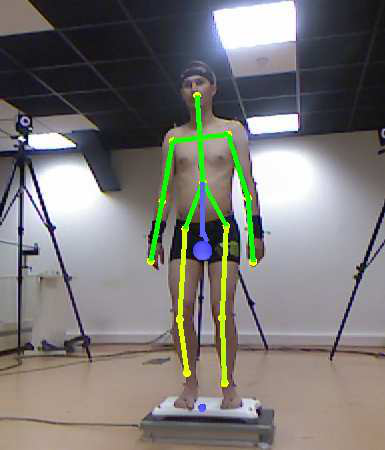
We have focused in improving the reliability of the identification during a study of the CoM trajectory in the sagital plane [14] . We studies small value for the condition number of the used data as well as of the parameter relative standard deviation () are useful to determine the validity of the estimate. Subsequent works have extended the human model to three-dimensional motion (Fig. 1 .a). In order to observe the tracking of the center of mass, we have developed a 3D visualization tool which represents the subject's skeleton and SESC in real time (Fig. 1 .b) [16] ; it is also possible to observe the CoM history. Finally we are now comparing the performance of the inexpensive Kinect sensor and the traditional video based motion capture Vicon system, with reasonably good results [15] . Current work is also focused in improving the speed of the identification phase by simplifying the assumed human model and using physical constraints to reduce the complexity of the SESC. Also the development of a simple to follow identification protocol which takes into account multiple supporting surfaces is desired.
Recursive estimation of SESC parameters for human Center of Mass estimation
Participants : Alejandro González, Mitsuhiro Hayashibe, Philippe Fraisse.
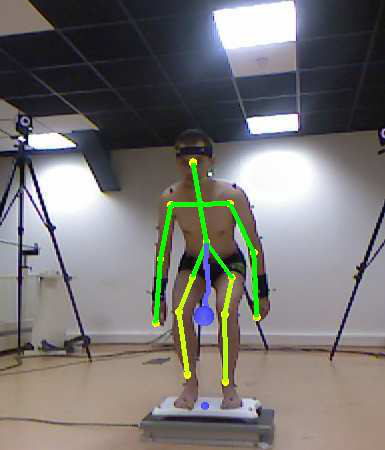
A human's center of mass (CoM) trajectory is useful to evaluate the dynamic stability during daily life activities such as walking and standing up. To estimate the subject-specific CoM position in the home environment, we make use of a statically equivalent serial chain (SESC) developed with a portable mesurement system. In order to adapt to the subject's physical capacities we implement a constrained Kalman filter to achieve an online parameter estimation of the SESC parameters. By accounting for the human body bilateral symmetry we hope to reduce the identification time. This results in constrainig SESC parameters to be consistent with the human skeletal model used. The Kinect camera is used as a markerless motion capture system for measuring limb orientations while the Wii board is used to measure the subject's center of pressure (CoP) during the identification phase. For his experiment CoP measurements and Kinect data were recorded for five able-bodied subjects. The data was then given to the proposed recursive algorithm to identify the parameters of the SESC online (Fig.2 ). This method of online identification allows the subject or the therapist to know the quality of the on-going CoM identification while giving postures; by doing this the time needed to perform the identification can be reduced. A cross-validation was performed to verify the identification performance.
|



FES-Induced Torque Prediction with Evoked EMG Synthesized by Recurrent Neural Network
Participants : Zhan Li, Mitsuhiro Hayashibe, David Guiraud.
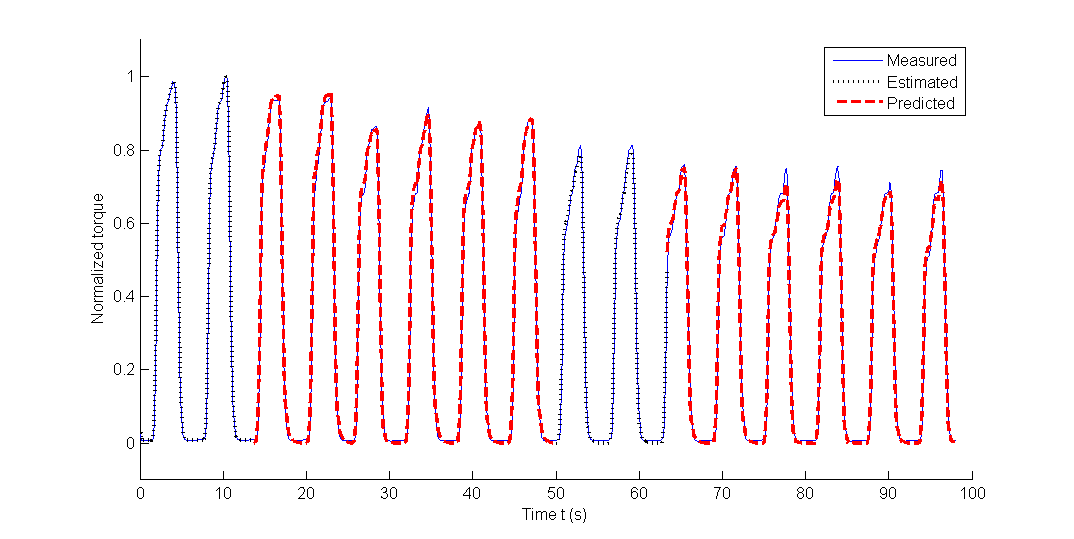
A NARX-type recurrent neural network (NARX-RNN) model is proposed for identification and prediction of FES-induced muscular dynamics with eEMG. Such NARX-RNN model is with a novel architecture for prediction, with robust prediction performance. To make fast convergence for identification of such NARXRNN, directly-learning pattern is exploited during the learning phase. Due to difficulty of choosing a proper forgetting factor of Kalman filter for predicting time-variant torque with eEMG, such NARX-RNN may be considered to be a better alternative as torque predictor. Data gathered from two SCI patients is used to evaluate the proposed NARX-RNN model. The NARX-RNN model shows promising estimation and prediction performance only based on eEMG [23] .
|
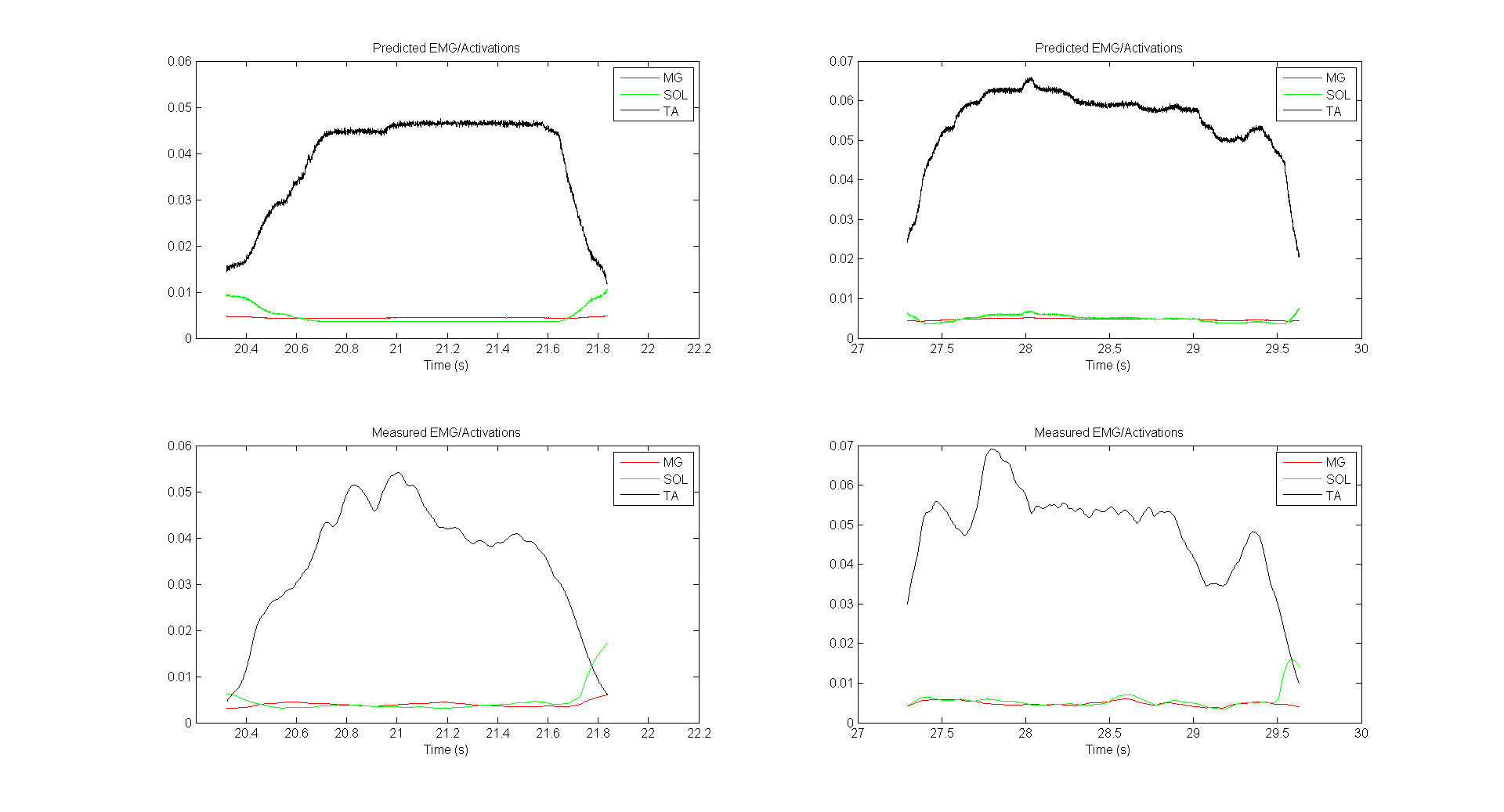
Inverse Estimation of Muscle Activations with Weights Optimization
Participants : Zhan Li, Mitsuhiro Hayashibe, David Guiraud.
Inverse estimation of activations of muscle groups at human lower leg in random movement condition is investigated with merely the ankle joint torque used. Optimization technique for the relationship between muscle activations and torque is exploited. Such optimization is able to rebuilt the relationship between muscle activations and torque inversely based on experimental data obtained from five healthy subjects, and the optimal weight matrix can indicate each muscle's contribution for producing the torque. Further cross-validation on prediction of muscle activations with joint torque with optimal weights shows such approach may possess promising performance [22] .
3D Volumetric Muscle Modeling For Real-time Deformation Analysis With FEM
Participants : Yacine Berranen, Mitsuhiro Hayashibe, Benjamin Gilles, David Guiraud.
Computer simulators are promising numerical tools to study muscle volumetric deformations but most models are facing very long computation time and thus are based on simplified Hill model versions. The purpose of this study is to develop a real-time three-dimensional biomechanical model of fusiform muscle based on modified Hill model for the active stress which is controlled from EMG recordings. Finite element model is used to estimate the passive behavior of the muscle and tendons during contraction. We show that this 3D model implementation is very cost effective with respect to the computation time and the simulation gives good results compared to real measured data. Thus, this effective implementation will allow implementing much more complex and realistic models, with moderate computation time.

Principal Geodesic Dynamics
Participants : Maxime Tournier, Lionel Reveret.
This paper presents a new integration of a data-driven approach using dimension reduction and a physically-based simulation for real-time character animation. We exploit Lie group statistical analysis techniques (Principal Geodesic Analysis, PGA) to approximate the pose manifold of a motion capture sequence by a reduced set of pose geodesics. We integrate this kinematic parametrization into a physically-based animation approach of virtual characters, by using the PGA-reduced parametrization directly as generalized coordinates of a Lagrangian formulation of mechanics. In order to achieve real-time without sacrificing stability, we derive an explicit time integrator by approximating existing variational integrators. Finally, we test our approach in task-space motion control. By formulating both physical simulation and inverse kinematics time stepping schemes as two quadratic programs, we propose a features-based control algorithm that interpolates between the two metrics. This allows for an intuitive trade-off between realistic physical simulation and controllable kinematic manipulation.
|
An improved kinematic model of the spine for three-dimensional motion analysis in the Vicon system
Participants : Pawel Maciejasz, Wieslaw Chwala (University School of Physical Education, Krakow), Miroslawa Dlugosz, Daria Panek, Witold Alda (AGH University of Science and Technology, Krakow).
The mechanism of creation and pathomechanics of lateral spinal deformation is still not fully explained. Modern medical imaging techniques give scientists possibility to understand some aspects, but vast majority of those techniques is based on static trials. A motion capture system belongs to techniques which enable visualization of a spine during dynamic trials; however, due to lack of appropriate computational model, it is unsuitable for scoliosis imaging.
A few years ago a kinematic model of the spine has been proposed to be used with Vicon Motion Capture System (Master thesis of P. Maciejasz). This model was based on Bézier curves and allowed for much more precise investigation of spinal kinematics during dynamic trials as compared with other computational models. However, it did not allowed to restrict only selected movements for particular segments of the spine (e.g. axial rotation for lumbar spine). The aim of the current work is to improve the proposed model in order to be able to restrict selected movements according to the knowledge concerning spinal anatomy and spinal range of motion. The new kinematic model of the spine was written in BodyBuilder for Biomechanics Language. For the purpose of visualization also an accurate graphical representation of each vertebra (polygon mesh) was computed and adapted to be compatible with the kinematic model. Using a new version of the model it is possible to perform precise analysis of movement of all vertebrae during such dynamic activities as e.g. gait and forward or lateral bending, as well as to present the results not only on the charts, but also as a 3D animation of movements of a realistically looking spine [12] .
Methodology of automated detection and classification of action potentials in nerve fiber based on multichannel recordings
Participants : Thomas Guiho, Pawel Maciejasz, David Guiraud.
For some neuroprosthetic applications it would be beneficial to be able to automatically detect when particular nerve fibers (axons) are in "firing" (i.e. when an action potential is propagating along them). Due to limitations of currently available recording electrodes on one side, and the attempt to be as little invasive as possible, at the moment in practical application it is not possible to record signals coming from a single nerve fiber. In signal recorded using typical electrodes placed close to nerve fibers, action potentials coming from various nerve fibers, as well as noise coming from outside of the nerve, may be detected. One of the possibilities allowing to distinguish action potentials coming from various nerve fibers in such a case is to record signals at a few places along the nerve and compare them.
We have proposed an algorithm that allows to automatically detect and classify evoked action potentials in a simple earthworm model. The signals were recorded concurrently at 2 places along the giant nerve fibers. In the first step the algorithm tries to identify only does recordings in which action potentials generated by various nerve fibers can be easily distinguished. Afterwards, the most significant features (such as amplitude, duration, propagation velocity, etc.) to distinguish between different populations of fibers are identified. Finally, the action potentials in all signals are identified and classified using the features determined in the previous step.
The proposed method was implemented using MATLAB software and tested on the file containing almost 200 signals record in response to various stimuli. The same data ware later inspected manually and the action potentials were manually classified. More than 99% of action potentials were classified to the same nerve fiber when performing automatic and manual classification.